桁架机器人的设计要求是什么?
作者:kfcrane 更新时间:2021-08-07 09:03:12
1.力求结构简单,重量轻,体积小
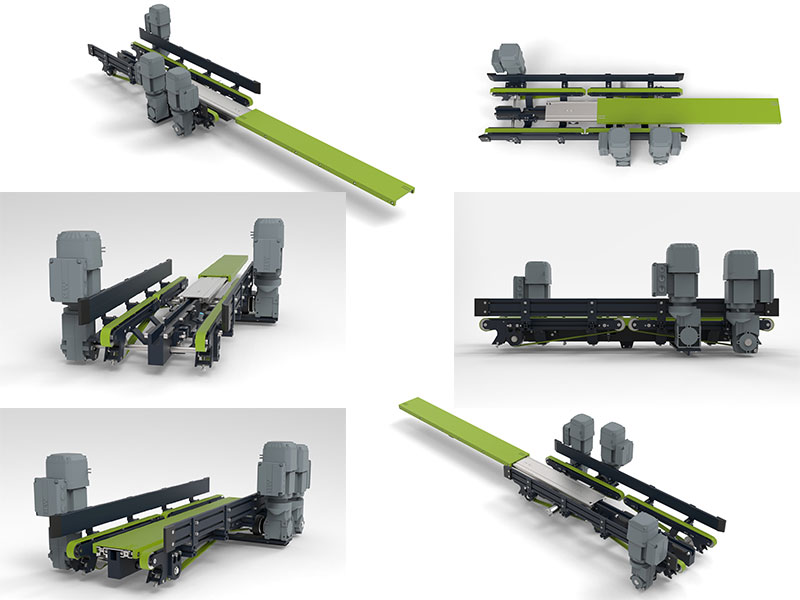
桁架式机器人的手位于腕部的前端,其运动状态在工作期间会发生变化。它的结构,重量和体积直接影响桁架机械手的结构,抓握重量,定位精度和速度。因此,在设计指针时,我们必须力求结构简单,重量轻且尺寸小。
2.手指应具有一定的强度和刚度
3.有适当的夹紧力
桁架机械手在工作时应具有适当的夹紧力,以确保稳定可靠的夹紧,较小的变形且不损坏工件的加工表面。对于非常刚性的工件,夹紧力应设计为可调的。对于重工件,应考虑使用自锁安全装置。
4.有足够的开合范围
握住手的手指被打开和关闭。工作时,一个手指的打开和关闭位置的变化量称为打开和关闭范围。对于旋转型手指的打开和关闭范围,可以通过打开和关闭角度以及手指夹持端的长度来表示。手指的打开和闭合范围的要求与许多因素有关,例如工件的形状和尺寸以及手指的形状和尺寸。一般来说,如果工作环境允许,打开和关闭范围更大
5.其他要求
因此,根据工件的形状,进给和夹紧式桁架机械手使用常用的两指式钳口,该夹紧方法由常闭弹簧夹紧,松开时使用单作用液压缸用来。该结构相对简单并且易于制造。
桁架化的机械臂是操纵器的主要执行部分。它的作用是支撑手腕和手并推动它们在太空中移动。
手臂运动的目的通常是在空间运动范围内的任何位置到达手柄。从手臂的力量来看,它在工作期间直接承受手腕,手和工件的动静载荷。而且自我运动更多,所以压力也更加复杂。
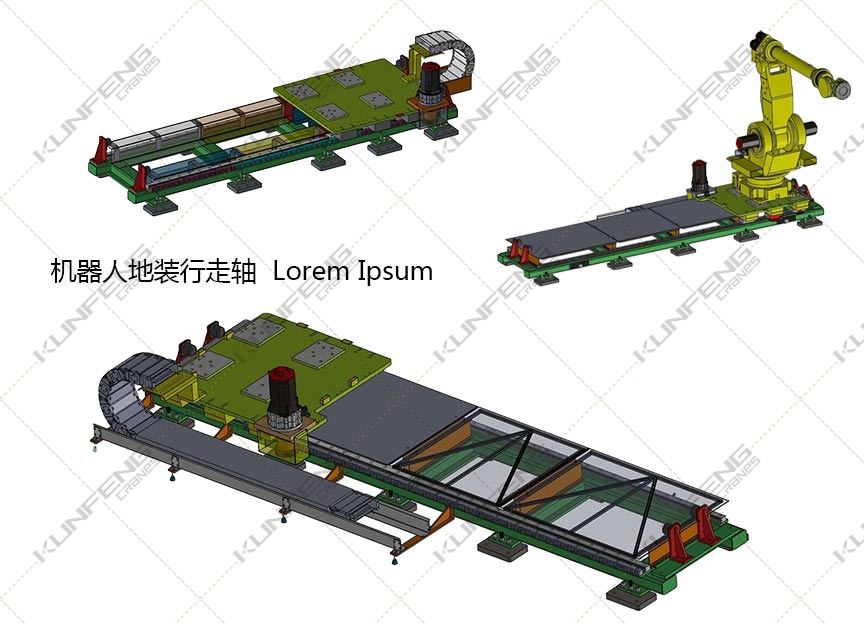
桁架机器人的精度集中在手所反射的位置的精度上。因此,选择合适的导向装置和定位方法尤为重要。
上一篇: 桁架机械手有哪些常见的安全装置
下一篇: 机器人行走轴第七轴全封闭地轨有哪些优点?