桁架机械手的延时抓取和放置的是怎么设计的?
作者:kfcrane 更新时间:2022-04-01 01:25:04
桁架机械手具有通过计算机编程来完成各种预期动作的特点,尤其体现在仿照人手的智能化和适应性方面。并且在准确性、效率、适用性等方面有着巨大的提升空间。
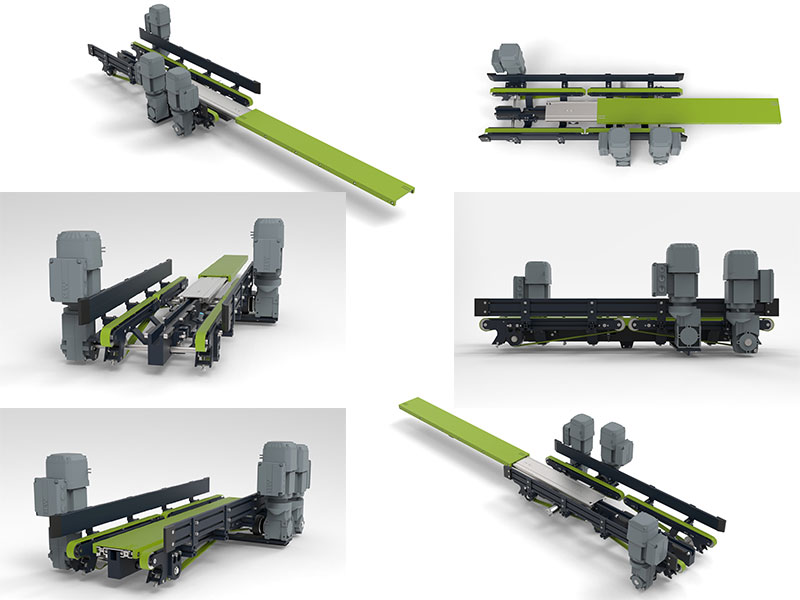
众所周知,桁架机械手包含桁架结构、机械抓手、电控部分等。那么,桁架机械手的抓取和放置的延时是怎么设计的呢?昆峰重工和大家分享一下桁架机械手的抓取和放置延时设计。
众所周知,桁架机械手包含桁架结构、机械抓手、电控部分等。那么,桁架机械手的抓取和放置的延时是怎么设计的呢?昆峰重工和大家分享一下桁架机械手的抓取和放置延时设计。

延时抓取和放置的目的:延时的设计是为了机械手能够对工件进行稳定的抓取和放置,由于机械手的体积较小,当手臂的活塞杆下降到一定的位置时,信号会被下限位的传感器接收,驱动气爪收缩夹紧,既要求速度要快捷,又要求夹取具有一定的准确度,因此要对设备进行精细的调试。
延时抓取和放置的设计:首先要使机械手的中心与工件的中心位置处于同一水平线上,随后要对每个工件的停留位置进行调整,使其能够处于同一位置之上,此外还要将下限位传感器安装在合适的位置,若是位置过高就会导致活塞杆没有完全伸直气爪就进行夹紧,撞击工件导致工件损坏。在其中的抓取和放置过程中设置延时,就能够对工件进行安全可靠的提升搬运。在机械手中设置延时,不仅能够保证气缸活塞杆能够降至最低的位置,同时也使得在气杆降至最低位置后能出现停顿,使下降过程中的惯性作用消除,减小工件与放置位置接触时的冲击力。
延时抓取和放置的设计:首先要使机械手的中心与工件的中心位置处于同一水平线上,随后要对每个工件的停留位置进行调整,使其能够处于同一位置之上,此外还要将下限位传感器安装在合适的位置,若是位置过高就会导致活塞杆没有完全伸直气爪就进行夹紧,撞击工件导致工件损坏。在其中的抓取和放置过程中设置延时,就能够对工件进行安全可靠的提升搬运。在机械手中设置延时,不仅能够保证气缸活塞杆能够降至最低的位置,同时也使得在气杆降至最低位置后能出现停顿,使下降过程中的惯性作用消除,减小工件与放置位置接触时的冲击力。
传感器能够对机械手的动作执行情况进行检测,以保证机械手能够安全可靠地完成整个搬运工作,这也是对机械手的状态控制,是当前控制机械设备的使用最为普遍的方式。状态控制能够促使机械设备对工作任务进行准确无误的完成,若设备出现故障问题,机修人员也能够对出现故障的位置进行快速地判断,并进行及时地维修。
昆峰重工专注桁架机械手的生产研发,欢迎来电咨询设计和报价。
上一篇: 上下料机械手详细说明
下一篇: 自动叠放式仓库简介